mirror of
https://gitee.com/milvus-io/milvus.git
synced 2024-12-03 04:19:18 +08:00
2.4 KiB
2.4 KiB
DataNode Flowgraph Recovery Design
update: 6.4.2021, by Goose update: 6.21.2021, by Goose
1. Common Sense
A. 1 message stream to 1 vchannel, so there are 1 start position and 1 end position in 1 message pack B. Only when datanode flushes, datanode will update every segment's position An optimization: update position of
- a. Current flushing segment
- b. StartPosition of segments never been flushed. C. DataNode auto-flush is a valid flush. D. DDL messages are now in DML Vchannels.
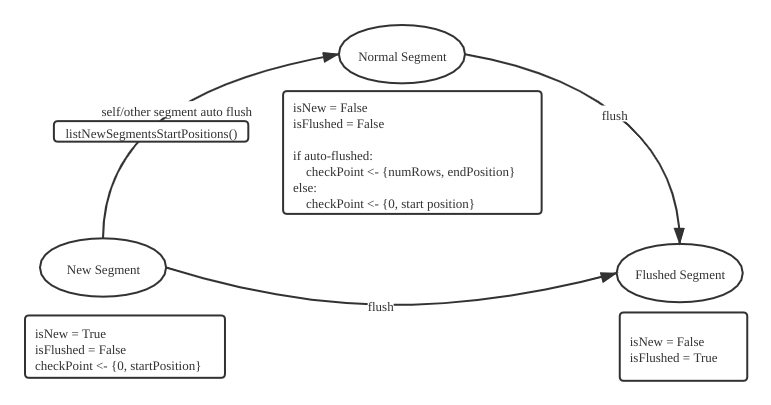
2. Segments in Flowgraph
3. Flowgraph Recovery
A. Save checkpoints
When a flowgraph flushes a segment, we need to save these things:
- current segment's binlog paths,
- current segment positions,
- all other segments' current positions from replica (If a segment hasn't been flushed, save the position when datanode first meet it.)
Whether save successfully:
- If successed, flowgraph updates all segments' position to replica
- If not
- For a grpc failure( this failure will appear after many times retry internally), crush itself.
- For a normal failure, retry save 10 times, if fail still, crush itself.
B. Recovery from a set of checkpoints
- We need all positions of all segments in this vchannel
p1, p2, ... pn
A design of WatchDmChannelReq
message VchannelInfo {
int64 collectionID = 1;
string channelName = 2;
internal.MsgPosition seek_position = 3;
repeated SegmentInfo unflushedSegments = 4;
repeated int64 flushedSegments = 5;
}
message WatchDmChannelsRequest {
common.MsgBase base = 1;
repeated VchannelInfo vchannels = 2;
}
- We want to filter msgPacks based on these positions.
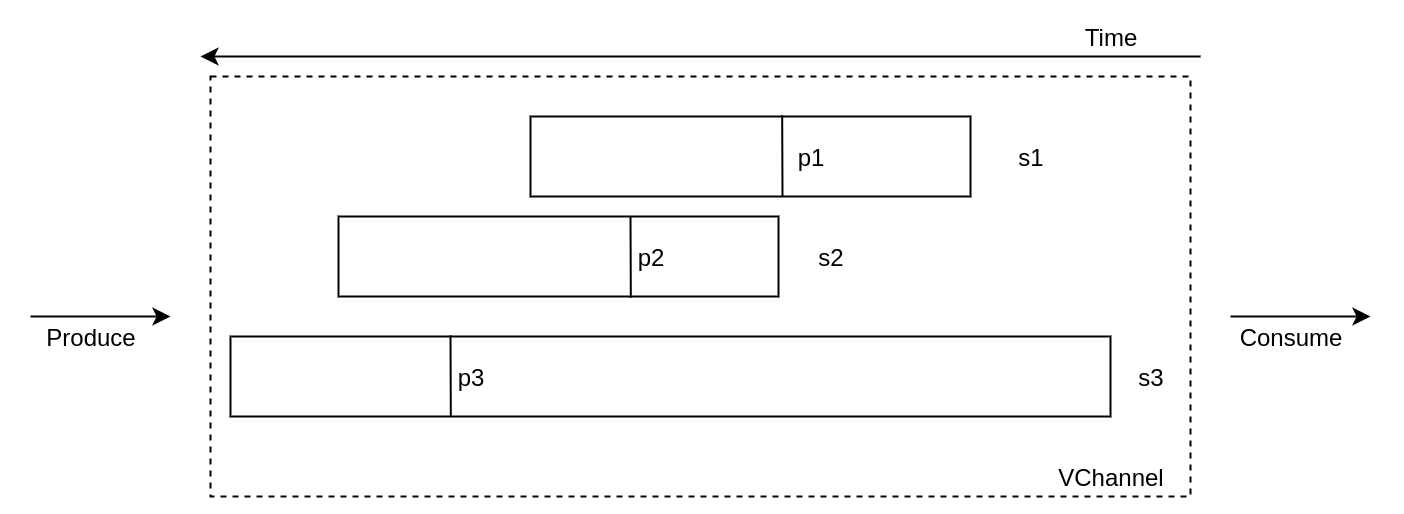
Supposing we have segment s1, s2, s3, corresponding position p1, p2, p3
- Sort positions in reverse order
p3, p2, p1 - Get segments dup range time:
s3 ( p3 > mp_px > p1),s2 (p2 > mp_px > p1),s1(zero) - Seek from the earliest, in this example
p1 - Then for every msgPack after seeking
p1, the pseudocode:
const filter_threshold = recovery_time
// mp means msgPack
for mp := seeking(p1) {
if mp.position.endtime < filter_threshod {
if mp.position < p3 {
filter s3
}
if mp.position < p2 {
filter s2
}
}
}